-
2026
-
Crocheted Capacitive Touch Sensors for Soft Reconfigurable Interfaces
Stephania Castro, Amy O'Connell, Bailey Cislowski, Nathaniel Dennler, Heather Culbertson, Maja Matarić
IEEE Haptics Symposium
✤ -
2025
-
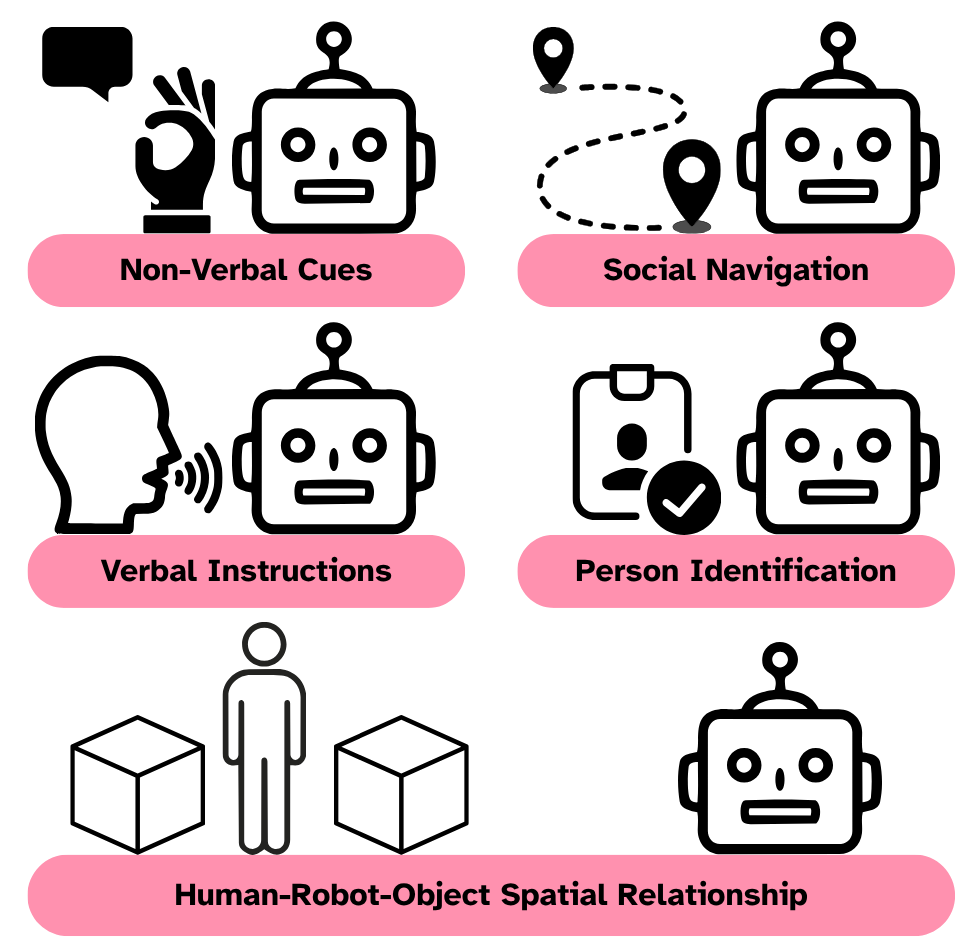
HRIBench: Benchmarking Vision-Language Models for Real-Time Human Perception in Human-Robot Interaction
Zhonghao Shi, Enyu Zhao, Nathaniel Dennler, Jingzhen Wang, Xinyang Xu, Kaleen Shrestha, Mengxue Fu, Daniel Seita, Maja Matarić.
International Symposium on Experimental Robotics (ISER)
-
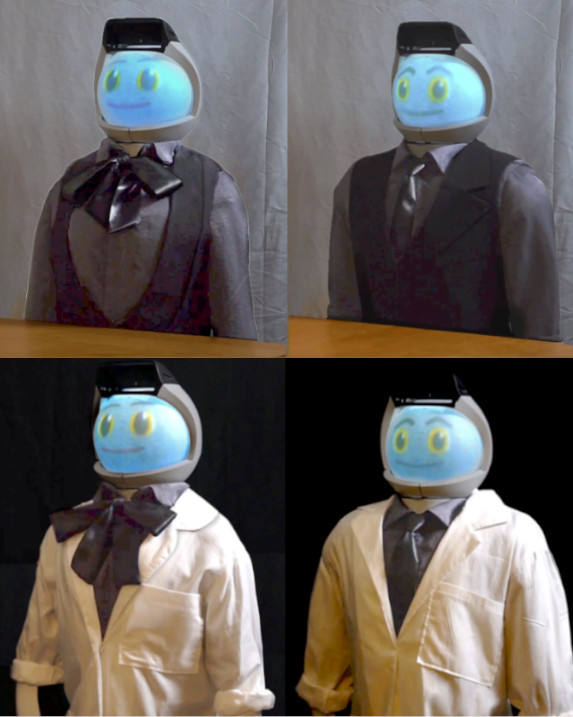
Designing Identity: The Role of Voice, Clothing, and Task on Robot Gender Perception
Nathaniel Dennler, Mina Kian, Stefanos Nikolaidis, Maja Matarić
2025 Springer International Journal on Social Robotics
-
2024
-
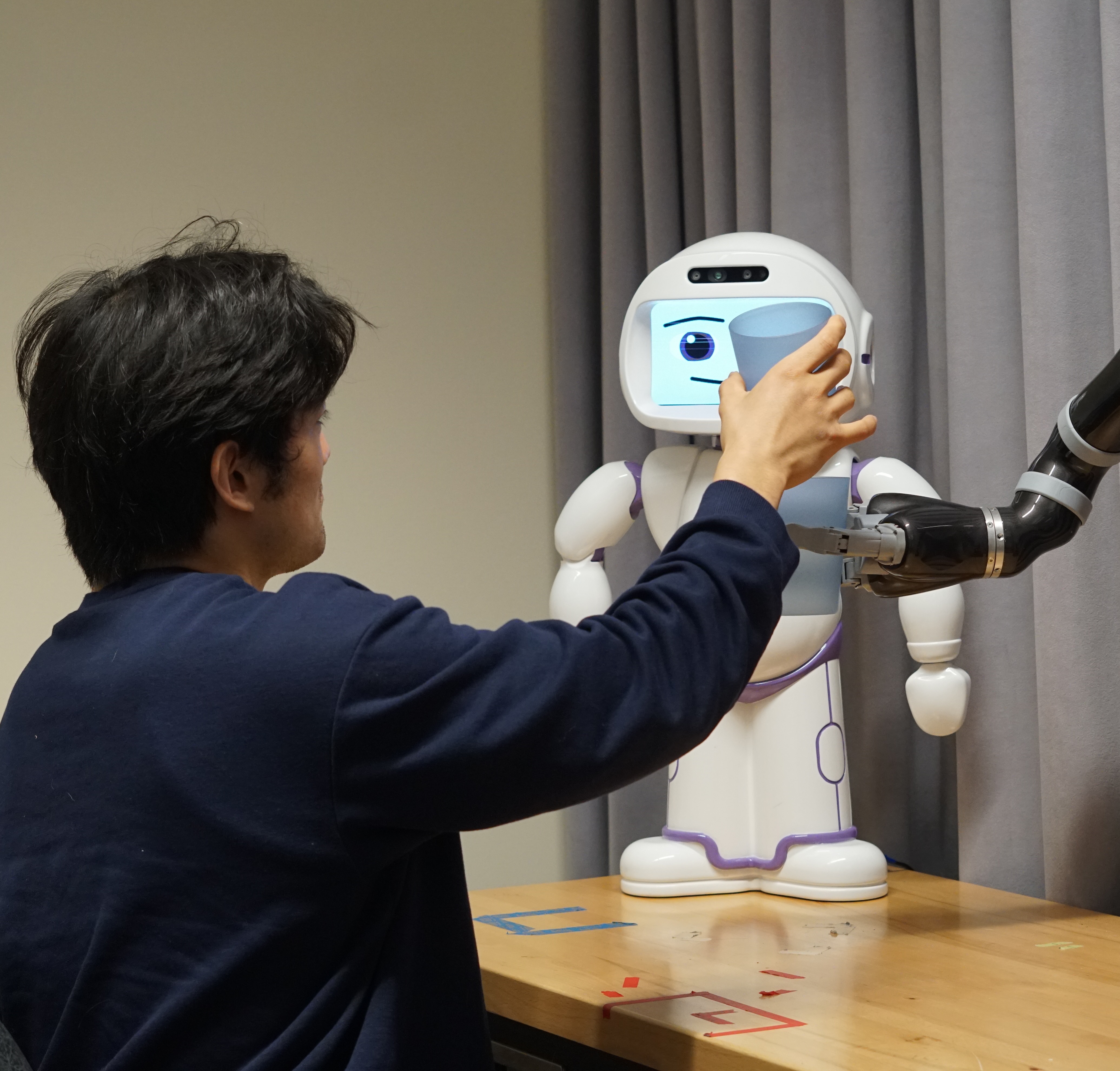
User Experience in Preference-Based Optimization of Reward Functions for Assistive Robots.
Nathaniel Dennler, Zhonghao Shi, Stefanos Nikolaidis, Maja Matarić
2024 International Symposium on Robotics Research (ISRR)
-
Adapting Task Difficulty in a Cup-Stacking Rehabilitative Task
Melina Daniilidis, Nathaniel Dennler, Maja Matarić, Stefanos Nikolaidis
2024 Companion of the ACM/IEEE International Conference on Human-Robot Interaction (HRI LBR)
-
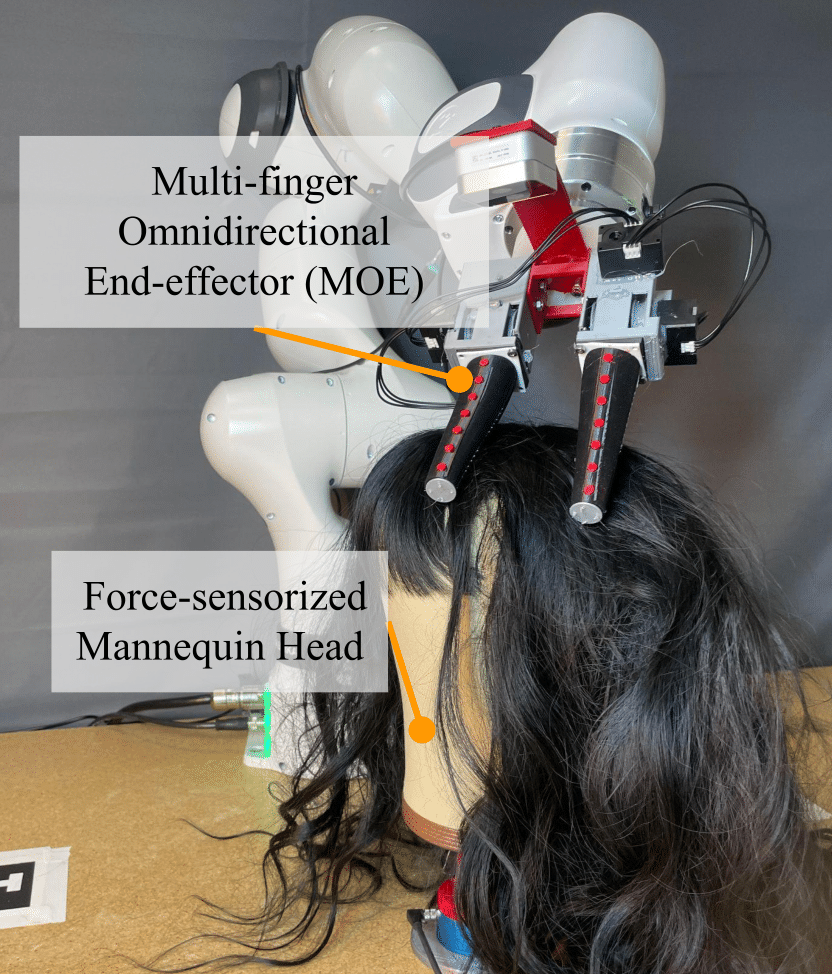
MOE-Hair: Toward Soft and Compliant Contact-rich Hair Manipulation and Care
Uksang Yoo, Nathaniel Dennler, Maja Matarić, Stefanos Nikolaidis, Jean Oh, Jeffrey Ichnowski
2024 Companion of the ACM/IEEE International Conference on Human-Robot Interaction (HRI LBR)
-
2023
-

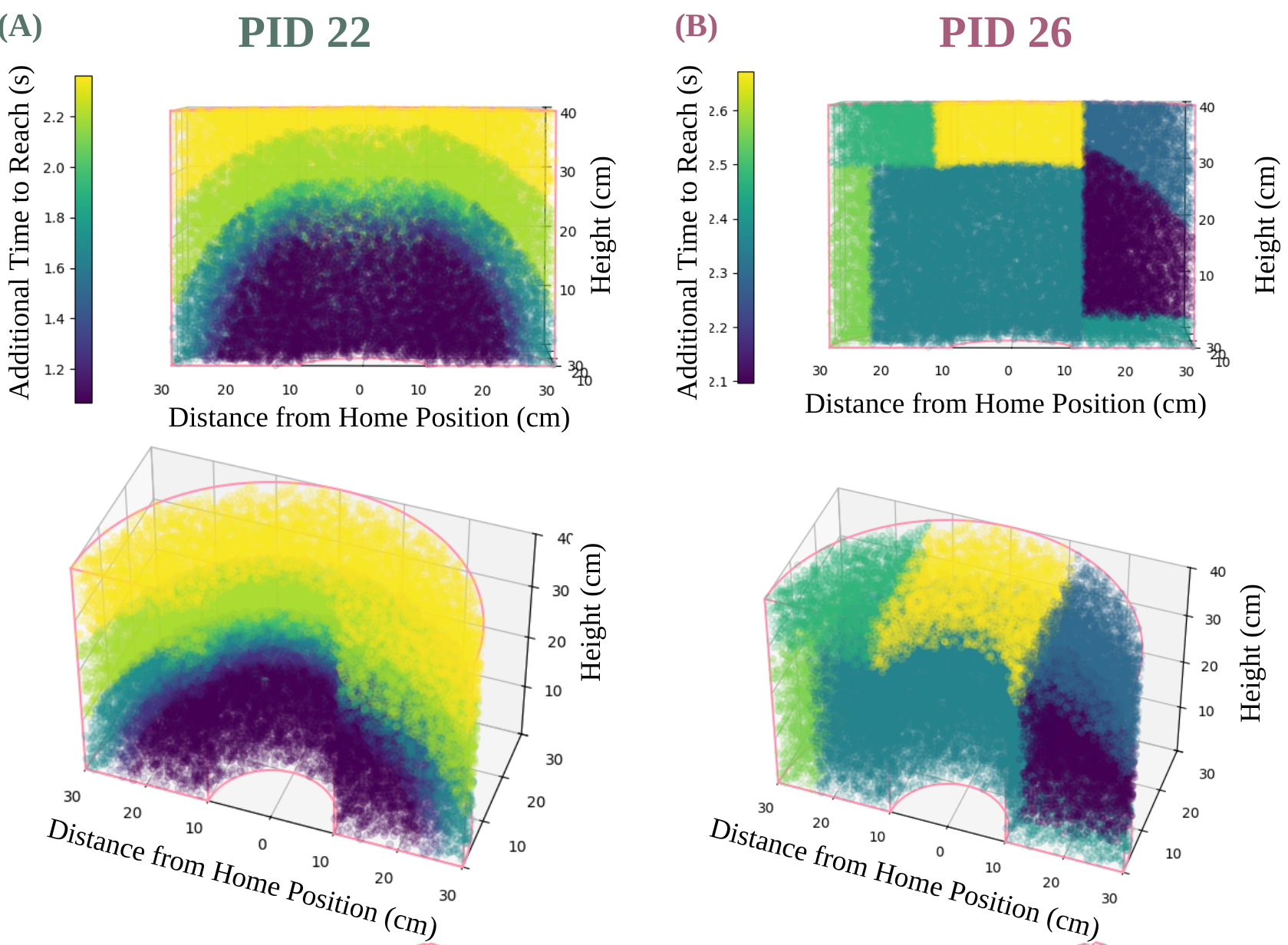
A metric for characterizing the arm nonuse workspace in poststroke individuals using a robot arm
Nathaniel Dennler, Amelia Cain, Erica De Guzman, Claudia Chiu, Carolee J. Winstein, Stefanos Nikolaidis, Maja J. Matarić
Science Robotics
-
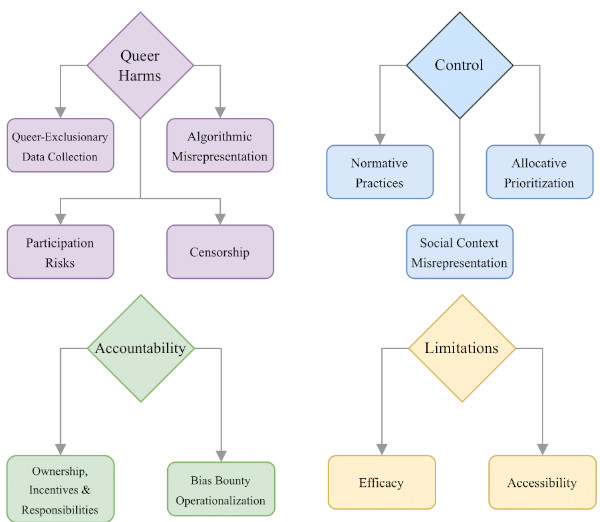
Bound by the Bounty: Collaboratively Shaping Evaluation Processes for Queer AI Harms
Nathaniel Dennler, Anaelia Ovalle, Ashwin Singh, Luca Soldaini, Arjun Subramonian, Huy Tu, William Agnew, Avijit Ghosh, Kyra Yee, Irene Font Peradejordi, Zeerak Talat, Mayra Russo, Jess De Jesus De Pinho Pinhal
2023 AAAI/ACM Conference on AI, Ethics, and Society (AIES)
-
The RoSiD Tool: Empowering Users to Design Multimodal Signals
Nathaniel Dennler, David Delgado, Daniel Zeng, Stefanos Nikolaidis, Maja Matarić
2023 International Symposium on Experimental Robotics (ISER)
-
pyribs: A bare-bones python library for quality diversity optimization
Bryon Tjanaka, Matthew C Fontaine, David H Lee, Yulun Zhang, Nivedit Reddy Balam, Nathaniel Dennler, Sujay S Garlanka, Nikitas Dimitri Klapsis, Stefanos Nikolaidis
2023 Proceedings of the Genetic and Evolutionary Computation Conference (GECCO)
-
Queer in AI: A case study in community-led participatory AI
Anaelia Ovalle, Arjun Subramonian, Ashwin Singh, Claas Voelcker, Danica J Sutherland, Davide Locatelli, Eva Breznik, Filip Klubicka, Hang Yuan, Huan Zhang, Jaidev Shriram, Kruno Lehman, Luca Soldaini, Maarten Sap, Marc Peter Deisenroth, Maria Leonor Pacheco, Maria Ryskina, Martin Mundt, Milind Agarwal, Nyx McLean, Pan Xu, A Pranav, Raj Korpan, Ruchira Ray, Sarah Mathew, Sarthak Arora, ST John, Tanvi Anand, Vishakha Agrawal, William Agnew, Yanan Long, Zijie J Wang, Zeerak Talat, Avijit Ghosh, Nathaniel Dennler, Michael Noseworthy, Sharvani Jha, Emi Baylor, Aditya Joshi, Natalia Y Bilenko, Andrew McNamara, Raphael Gontijo-Lopes, Alex Markham, Evyn Dong, Jackie Kay, Manu Saraswat, Nikhil Vytla, Luke Stark
2023 ACM Conference on Fairness, Accountability, and Transparency (FAccT)
-

Can a gender-ambiguous voice reduce gender stereotypes in human-robot interactions?
Ilaria Torre, Erik Lagerstedt, Nathaniel Dennler, Katie Seaborn, Iolanda Leite, Éva Székely
2023 IEEE International Conference on Robot and Human Interactive Communication (RO-MAN)
-
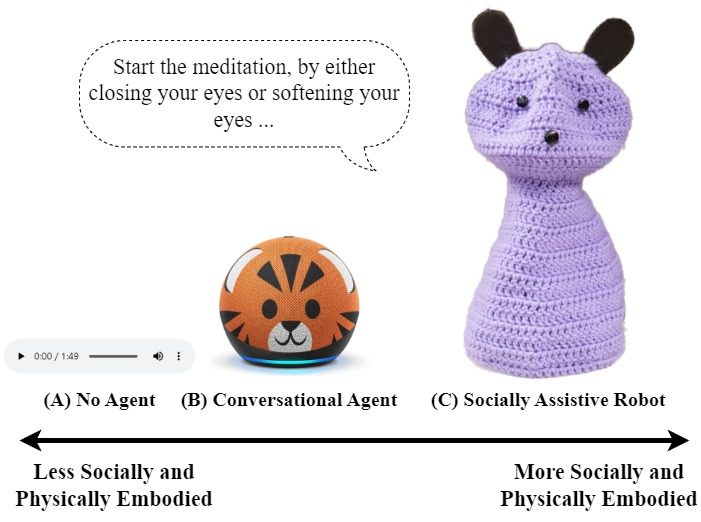
Evaluating and personalizing user-perceived quality of text-to-speech voices for delivering mindfulness meditation with different physical embodiments
Zhonghao Shi, Han Chen, Anna-Maria Velentza, Siqi Liu, Nathaniel Dennler, Allison O'Connell,Maja Matarić
2023 ACM/IEEE International Conference on Human-Robot Interaction (HRI)
-
2021
-
Personalizing User Engagement Dynamics in a Non-Verbal Communication Game for Cerebral Palsy
Nathaniel Dennler, Catherine Yunis, Jonathan Realmuto, Terence Sanger, Stefanos Nikolaidis, Maja Matarić
2021 IEEE International Conference on Robot & Human Interactive Communication (RO-MAN)